
ക്യാമറ മൊഡ്യൂളിന്റെ അടിസ്ഥാന ഘടന
I. ക്യാമറ ഘടനയും പ്രവർത്തന തത്വവും
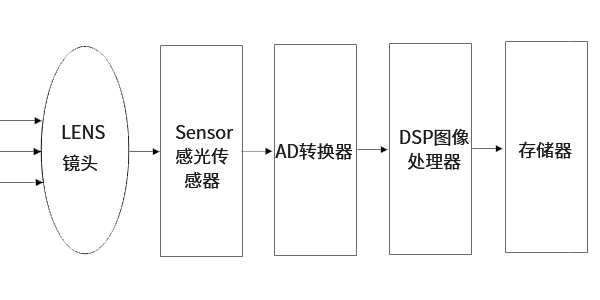
രംഗം ലെൻസിലൂടെ ചിത്രീകരിക്കുന്നു, ജനറേറ്റഡ് ഒപ്റ്റിക്കൽ ഇമേജ് സെൻസറിലേക്ക് പ്രൊജക്റ്റ് ചെയ്യുന്നു, തുടർന്ന് ഒപ്റ്റിക്കൽ ഇമേജ് ഇലക്ട്രിക്കൽ സിഗ്നലായി പരിവർത്തനം ചെയ്യപ്പെടുന്നു, അത് അനലോഗ്-ടു-ഡിജിറ്റൽ പരിവർത്തനത്തിലൂടെ ഡിജിറ്റൽ സിഗ്നലായി പരിവർത്തനം ചെയ്യപ്പെടുന്നു.ഡിജിറ്റൽ സിഗ്നൽ ഡിഎസ്പി പ്രോസസ്സ് ചെയ്യുകയും തുടർന്ന് പ്രോസസ്സിംഗിനായി കമ്പ്യൂട്ടറിലേക്ക് അയയ്ക്കുകയും ഒടുവിൽ ഫോൺ സ്ക്രീനിൽ കാണാൻ കഴിയുന്ന ഒരു ചിത്രമായി പരിവർത്തനം ചെയ്യുകയും ചെയ്യുന്നു.
ഡിജിറ്റൽ സിഗ്നൽ പ്രോസസ്സിംഗ് (DSP) ചിപ്പിന്റെ പ്രവർത്തനം: സങ്കീർണ്ണമായ ഗണിതശാസ്ത്ര അൽഗോരിതങ്ങളുടെ ഒരു പരമ്പരയിലൂടെ ഡിജിറ്റൽ ഇമേജ് സിഗ്നൽ പാരാമീറ്ററുകൾ ഒപ്റ്റിമൈസ് ചെയ്യുക, കൂടാതെ USB വഴിയും മറ്റ് ഇന്റർഫേസുകളിലൂടെയും PC-കളിലേക്കും മറ്റ് ഉപകരണങ്ങളിലേക്കും പ്രോസസ്സ് ചെയ്ത സിഗ്നലുകൾ കൈമാറുക.DSP ഘടന ഫ്രെയിം:
1, ISP (ഇമേജ് സിഗ്നൽ പ്രോസസർ)
1. ISP (ഇമേജ് സിഗ്നൽ പ്രോസസർ)
2, JPEG എൻകോഡർ
2. JPEG എൻകോഡർ
3, USB ഉപകരണ കൺട്രോളർ
3. USB ഉപകരണ കൺട്രോളർ
രണ്ട് തരത്തിലുള്ള സാധാരണ ക്യാമറ സെൻസറുകൾ ഉണ്ട്,
ഒന്ന് CCD (Chagre Couled Device) സെൻസർ, അതായത് ചാർജ് കപ്പിൾഡ് ഉപകരണം.
മറ്റൊന്ന് CMOS (കോംപ്ലിമെന്ററി മെറ്റൽ-ഓക്സൈഡ് അർദ്ധചാലകം) സെൻസർ, അതായത് കോംപ്ലിമെന്ററി മെറ്റൽ ഓക്സൈഡ് അർദ്ധചാലകം.
സിസിഡിയുടെ ഗുണം നല്ല ഇമേജിംഗ് നിലവാരത്തിലാണ്, എന്നാൽ നിർമ്മാണ പ്രക്രിയ സങ്കീർണ്ണമാണ്, ചെലവ് കൂടുതലാണ്, വൈദ്യുതി ഉപഭോഗം കൂടുതലാണ്.അതേ റെസല്യൂഷനിൽ, CMOS CCD-യെക്കാൾ വിലകുറഞ്ഞതാണ്, എന്നാൽ ചിത്രത്തിന്റെ ഗുണനിലവാരം CCD-യേക്കാൾ കുറവാണ്.സിസിഡിയുമായി താരതമ്യപ്പെടുത്തുമ്പോൾ, CMOS ഇമേജ് സെൻസറിന് കുറഞ്ഞ പവർ ഉപഭോഗമുണ്ട്.കൂടാതെ, പ്രോസസ് ടെക്നോളജിയുടെ പുരോഗതിക്കൊപ്പം, CMOS- ന്റെ ഇമേജ് നിലവാരവും തുടർച്ചയായി മെച്ചപ്പെടുത്തിയിട്ടുണ്ട്.അതിനാൽ, വിപണിയിൽ നിലവിലുള്ള മൊബൈൽ ഫോൺ ക്യാമറകൾ എല്ലാം CMOS സെൻസറുകൾ ഉപയോഗിക്കുന്നു.
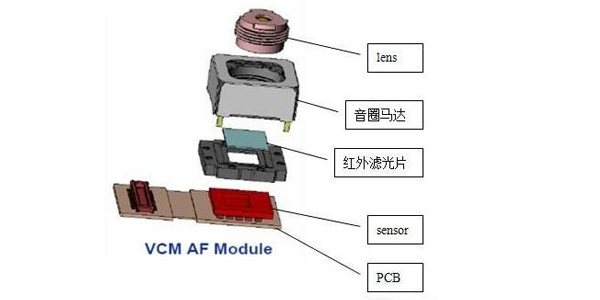
മൊബൈൽ ഫോൺ ക്യാമറയുടെ ലളിതമായ ഘടന
ലെൻസ്: പ്രകാശം ശേഖരിച്ച് ഇമേജിംഗ് മീഡിയത്തിന്റെ ഉപരിതലത്തിലേക്ക് ദൃശ്യം പ്രൊജക്റ്റ് ചെയ്യുക.
ഇമേജ് സെൻസർ: ഇമേജിംഗ് മീഡിയം, ഇത് ലെൻസ് പ്രൊജക്റ്റ് ചെയ്യുന്ന ഇമേജിനെ (ലൈറ്റ് സിഗ്നൽ) ഉപരിതലത്തിലേക്ക് ഒരു വൈദ്യുത സിഗ്നലാക്കി മാറ്റുന്നു.
മോട്ടോർ: ലെൻസിന്റെ ചലനത്തെ നയിക്കുന്നു, അങ്ങനെ ലെൻസ് ഇമേജിംഗ് മീഡിയത്തിന്റെ ഉപരിതലത്തിലേക്ക് വ്യക്തമായ ഒരു ചിത്രം നൽകുന്നു.
കളർ ഫിൽട്ടർ: മനുഷ്യന്റെ കണ്ണ് കാണുന്ന ദൃശ്യം ദൃശ്യമായ ലൈറ്റ് ബാൻഡിലാണ്, കൂടാതെ ഇമേജ് സെൻസറിന് മനുഷ്യന്റെ കണ്ണിനേക്കാൾ ലൈറ്റ് ബാൻഡ് തിരിച്ചറിയാൻ കഴിയും.അതിനാൽ, അധിക ലൈറ്റ് ബാൻഡ് ഫിൽട്ടർ ചെയ്യാൻ ഒരു കളർ ഫിൽട്ടർ ചേർക്കുന്നു, അതുവഴി ഇമേജ് സെൻസറിന് കണ്ണുകൾ കാണുന്ന യഥാർത്ഥ ദൃശ്യങ്ങൾ പകർത്താനാകും.
മോട്ടോർ ഡ്രൈവ് ചിപ്പ്: മോട്ടോറിന്റെ ചലനം നിയന്ത്രിക്കാനും ഓട്ടോഫോക്കസ് നേടുന്നതിന് ലെൻസ് ഓടിക്കാനും ഉപയോഗിക്കുന്നു.
സർക്യൂട്ട് ബോർഡ് സബ്സ്ട്രേറ്റ്: ഇമേജ് സെൻസറിന്റെ വൈദ്യുത സിഗ്നൽ പിൻഭാഗത്തേക്ക് കൈമാറുക.
II.ബന്ധപ്പെട്ട പാരാമീറ്ററുകളും നാമങ്ങളും
1. സാധാരണ ഇമേജ് ഫോർമാറ്റുകൾ
1.1 RGB ഫോർമാറ്റ്:
പരമ്പരാഗത ചുവപ്പ്, പച്ച, നീല ഫോർമാറ്റ്, RGB565, RGB888;16-ബിറ്റ് ഡാറ്റ ഫോർമാറ്റ് 5-ബിറ്റ് R + 6-ബിറ്റ് G + 5-ബിറ്റ് B ആണ്. മനുഷ്യന്റെ കണ്ണുകൾ പച്ചയോട് കൂടുതൽ സെൻസിറ്റീവ് ആയതിനാൽ G-യ്ക്ക് ഒരു ബിറ്റ് കൂടി ഉണ്ട്.
1.2 YUV ഫോർമാറ്റ്:
Luma (Y) + chroma (UV) ഫോർമാറ്റ്.ലുമിനൻസ് പാരാമീറ്ററും ക്രോമിനൻസ് പാരാമീറ്ററും വെവ്വേറെ പ്രകടിപ്പിക്കുന്ന പിക്സൽ ഫോർമാറ്റിനെയാണ് YUV സൂചിപ്പിക്കുന്നു.ഈ വേർതിരിവിന്റെ പ്രയോജനം, ഇത് പരസ്പര ഇടപെടൽ ഒഴിവാക്കുക മാത്രമല്ല, ചിത്രത്തിന്റെ ഗുണനിലവാരത്തെ വളരെയധികം ബാധിക്കാതെ ക്രോമ സാമ്പിൾ നിരക്ക് കുറയ്ക്കുകയും ചെയ്യുന്നു എന്നതാണ്.YUV എന്നത് കൂടുതൽ പൊതുവായ പദമാണ്.അതിന്റെ നിർദ്ദിഷ്ട ക്രമീകരണത്തിനായി, അതിനെ പല പ്രത്യേക ഫോർമാറ്റുകളായി തിരിക്കാം.
ക്രോമ (UV) നിറത്തിന്റെ രണ്ട് വശങ്ങളെ നിർവചിക്കുന്നു: യഥാക്രമം CB, CR എന്നിവ പ്രതിനിധീകരിക്കുന്ന നിറവും സാച്ചുറേഷനും.അവയിൽ, Cr RGB ഇൻപുട്ട് സിഗ്നലിന്റെ ചുവന്ന ഭാഗവും RGB സിഗ്നലിന്റെ തെളിച്ച മൂല്യവും തമ്മിലുള്ള വ്യത്യാസം പ്രതിഫലിപ്പിക്കുന്നു, അതേസമയം Cb RGB ഇൻപുട്ട് സിഗ്നലിന്റെ നീല ഭാഗവും RGB സിഗ്നലിന്റെ തെളിച്ച മൂല്യവും തമ്മിലുള്ള വ്യത്യാസം പ്രതിഫലിപ്പിക്കുന്നു.
YCbCr 4:2:0, YCbCr 4:2:2, YCbCr 4:1:1, YCbCr 4:4:4 എന്നിവയാണ് പ്രധാന സാമ്പിൾ ഫോർമാറ്റുകൾ.
1.3 റോ ഡാറ്റ ഫോർമാറ്റ്:
CMOS അല്ലെങ്കിൽ CCD ഇമേജ് സെൻസർ ക്യാപ്ചർ ചെയ്ത ലൈറ്റ് സോഴ്സ് സിഗ്നലിനെ ഡിജിറ്റൽ സിഗ്നലാക്കി മാറ്റുന്ന അസംസ്കൃത ഡാറ്റയാണ് RAW ഇമേജ്.ഡിജിറ്റൽ ക്യാമറ സെൻസറിന്റെ യഥാർത്ഥ വിവരങ്ങളും ക്യാമറ സൃഷ്ടിച്ച ചില മെറ്റാഡാറ്റയും (ഐഎസ്ഒ ക്രമീകരണങ്ങൾ, ഷട്ടർ സ്പീഡ്, അപ്പർച്ചർ മൂല്യം, വൈറ്റ് ബാലൻസ് മുതലായവ) രേഖപ്പെടുത്തുന്ന ഒരു ഫയലാണ് റോ ഫയൽ.RAW എന്നത് പ്രോസസ്സ് ചെയ്യാത്തതും കംപ്രസ് ചെയ്യാത്തതുമായ ഒരു ഫോർമാറ്റാണ്, ഇതിനെ "റോ ഇമേജ് കോഡഡ് ഡാറ്റ" അല്ലെങ്കിൽ കൂടുതൽ വ്യക്തമായി "ഡിജിറ്റൽ നെഗറ്റീവ്" എന്ന് വിളിക്കാം.സെൻസറിന്റെ ഓരോ പിക്സലും ഒരു കളർ ഫിൽട്ടറുമായി യോജിക്കുന്നു, കൂടാതെ ഫിൽട്ടറുകൾ ബേയർ പാറ്റേൺ അനുസരിച്ച് വിതരണം ചെയ്യുന്നു.ഓരോ പിക്സലിന്റെയും ഡാറ്റ നേരിട്ട് ഔട്ട്പുട്ട് ചെയ്യുന്നു, അതായത് RAW RGB ഡാറ്റ
റോ ഡാറ്റ (റോ RGB) കളർ ഇന്റർപോളേഷനു ശേഷം RGB ആയി മാറുന്നു.
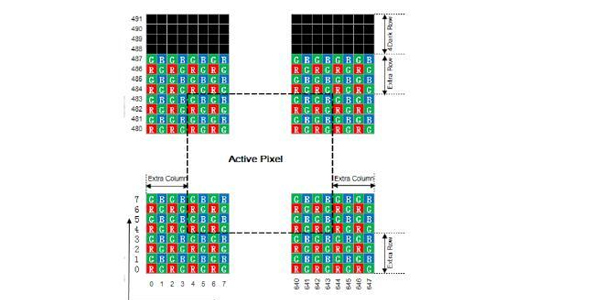
RAW ഫോർമാറ്റ് ഇമേജ് ഉദാഹരണം
2. ബന്ധപ്പെട്ട സാങ്കേതിക സൂചകങ്ങൾ
2.1 ചിത്ര മിഴിവ്:
SXGA (1280 x1024), 1.3 മെഗാപിക്സലുകൾ
XGA (1024 x768), 0.8 മെഗാപിക്സലുകൾ
SVGA (800 x600), 0.5 മെഗാപിക്സലുകൾ
VGA (640x480), 0.3 മെഗാപിക്സലുകൾ (0.35 മെഗാപിക്സലുകൾ 648X488 സൂചിപ്പിക്കുന്നു)
CIF(352x288), 0.1 മെഗാപിക്സലുകൾ
SIF/QVGA(320x240)
QCIF(176x144)
QSIF/QQVGA(160x120)
2.2 കളർ ഡെപ്ത് (വർണ്ണ ബിറ്റുകളുടെ എണ്ണം):
256 കളർ ഗ്രേ സ്കെയിൽ, 256 തരം ഗ്രേ (കറുപ്പും വെളുപ്പും ഉൾപ്പെടെ).
15 അല്ലെങ്കിൽ 16-ബിറ്റ് നിറം (ഉയർന്ന നിറം): 65,536 നിറങ്ങൾ.
24-ബിറ്റ് നിറം (യഥാർത്ഥ നിറം): ഓരോ പ്രാഥമിക നിറത്തിനും 256 ലെവലുകൾ ഉണ്ട്, അവയുടെ കോമ്പിനേഷനിൽ 256*256*256 നിറങ്ങളുണ്ട്.
32-ബിറ്റ് നിറം: 24-ബിറ്റ് നിറത്തിന് പുറമേ, ഓവർലാപ്പിംഗ് ലെയറിന്റെ (ആൽഫ ചാനൽ) ഗ്രാഫിക് ഡാറ്റ സംഭരിക്കുന്നതിന് അധിക 8 ബിറ്റുകൾ ഉപയോഗിക്കുന്നു.
2.3 ഒപ്റ്റിക്കൽ സൂമും ഡിജിറ്റൽ സൂമും:
ഒപ്റ്റിക്കൽ സൂം: ലെൻസ് ക്രമീകരിച്ചുകൊണ്ട് നിങ്ങൾ ഷൂട്ട് ചെയ്യാൻ ആഗ്രഹിക്കുന്ന ഒബ്ജക്റ്റ് സൂം ഇൻ/ഔട്ട് ചെയ്യുക.ഇത് പിക്സലുകളും ഇമേജ് നിലവാരവും അടിസ്ഥാനപരമായി മാറ്റമില്ലാതെ നിലനിർത്തുന്നു, എന്നാൽ നിങ്ങൾക്ക് അനുയോജ്യമായ ചിത്രം എടുക്കാം.ഡിജിറ്റൽ സൂം: യഥാർത്ഥത്തിൽ സൂം ഇല്ല.ഇത് യഥാർത്ഥ ചിത്രത്തിൽ നിന്ന് എടുത്ത് സൂം ഇൻ ചെയ്യുന്നു. LCD സ്ക്രീനിൽ നിങ്ങൾ കാണുന്നത് വലുതാക്കിയിരിക്കുന്നു, എന്നാൽ ചിത്രത്തിന്റെ ഗുണനിലവാരം കാര്യമായി മെച്ചപ്പെട്ടിട്ടില്ല, കൂടാതെ നിങ്ങളുടെ ക്യാമറയ്ക്ക് ഷൂട്ട് ചെയ്യാൻ കഴിയുന്ന പരമാവധി പിക്സലുകളേക്കാൾ പിക്സലുകൾ കുറവാണ്.ചിത്രത്തിന്റെ ഗുണനിലവാരം അടിസ്ഥാനപരമായി അയോഗ്യമാണ്, എന്നാൽ ഇതിന് കുറച്ച് സൗകര്യം നൽകാൻ കഴിയും.
2.4 ഇമേജ് കംപ്രഷൻ രീതി:
JPEG/M-JPEG
H.261/H.263
എം.പി.ഇ.ജി
H.264
2.5 ചിത്ര ശബ്ദം:
ഇത് ചിത്രത്തിലെ ശബ്ദത്തെയും ഇടപെടലിനെയും സൂചിപ്പിക്കുന്നു കൂടാതെ ചിത്രത്തിൽ സ്ഥിരമായ വർണ്ണ ശബ്ദമായി ദൃശ്യമാകുന്നു.
2.6 ഓട്ടോ വൈറ്റ് ബാലൻസ്:
ലളിതമായി പറഞ്ഞാൽ: ക്യാമറ വഴി വെളുത്ത വസ്തുക്കളുടെ പുനഃസ്ഥാപനം.അനുബന്ധ ആശയങ്ങൾ: വർണ്ണ താപനില.
2.7 വ്യൂവിംഗ് ആംഗിൾ:
മനുഷ്യന്റെ കണ്ണിന്റെ ഇമേജിംഗിന്റെ അതേ തത്വമാണ് ഇതിന് ഉള്ളത്, ഇത് ഇമേജിംഗ് ശ്രേണി എന്നും അറിയപ്പെടുന്നു.
2.8 ഓട്ടോ ഫോക്കസ്:
ഓട്ടോഫോക്കസിനെ രണ്ട് വിഭാഗങ്ങളായി തിരിക്കാം: ഒന്ന് ലെൻസും സബ്ജക്റ്റും തമ്മിലുള്ള ദൂരത്തെ അടിസ്ഥാനമാക്കിയുള്ള ഓട്ടോഫോക്കസ് റേഞ്ച്, മറ്റൊന്ന് ഫോക്കസിംഗ് സ്ക്രീനിലെ വ്യക്തമായ ഇമേജിംഗിനെ അടിസ്ഥാനമാക്കിയുള്ള ഫോക്കസ് ഡിറ്റക്ഷൻ ഓട്ടോഫോക്കസ് (ഷാർപ്നെസ് അൽഗോരിതം).
ശ്രദ്ധിക്കുക: സൂം ചെയ്യുന്നത് ദൂരെയുള്ള വസ്തുക്കളെ അടുപ്പിക്കുന്നതിനാണ്.ചിത്രം വ്യക്തമാക്കുന്നതിലാണ് ശ്രദ്ധ കേന്ദ്രീകരിക്കുന്നത്.
2.9 ഓട്ടോ എക്സ്പോഷറും ഗാമയും:
ഇത് അപ്പേർച്ചറും ഷട്ടറും ചേർന്നതാണ്.അപ്പേർച്ചർ, ഷട്ടർ സ്പീഡ്, ഐ.എസ്.ഒ.തെളിച്ചത്തോടുള്ള മനുഷ്യന്റെ കണ്ണിന്റെ പ്രതികരണ വക്രമാണ് ഗാമ.
III.മറ്റ് ക്യാമറ ഘടന

3.1 ഫിക്സഡ് ഫോക്കസ് ക്യാമറ ഘടന
3.2 ഒപ്റ്റിക്കൽ ഇമേജ് സ്റ്റെബിലൈസേഷൻ ക്യാമറ ഘടന

3.3 MEMS ക്യാമറ
പോസ്റ്റ് സമയം: മെയ്-28-2021




